Лекция 3. Управление процессами (диспетчеризация). Приоритеты процессов
Общие принципы управления процессам
Для организации управления процессами необходимо учесть по меньшей мере два основных аспекта: определение уровня, на котором выполняется планирование процессов и выбор алгоритма планирования.
Уровни планирования
Одной из важных задач, которую решает ОС является проблема, связанная с определением когда и каким процессам следует выделять ресурсы процессора — задача планирования загрузки процессоров. Существуют три уровня такого планирования (рис. 4).
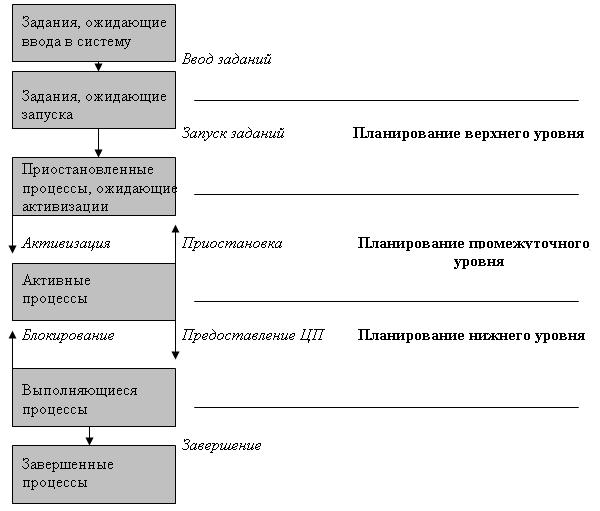
Рис. 4. Уровни планирования
Планирование на верхнем уровне или планирование заданий — это средства, которые определяют, каким заданиям будет разрешено активно конкурировать за захват ресурсов системы. Вошедшие в систему задания становятся процессами или группами процессов.
Планирование на промежуточном уровне. Средства этого уровня определяют, каким процессам будет разрешено конкурировать за захват ЦП. Планировщик этого уровня определяет, какие процессы приостанавливаются, а какие возбуждаются для обеспечения равномерной загрузки системы.
Планирование на нижнем уровне. Средства этого уровня выполняют диспетчерские функции, определяя, какому из готовых к выполнению процессов будут предоставлены ресурсы ЦП.
Цели планирования
Дисциплина планирования должна быть:
- справедливой;
- обеспечивать максимальную пропускную способность системы;
- приемлемые времена ответа для максимального количества пользователей, работающих в интерактивном режиме;
- предсказуемость;
- минимальные накладные расходы;
- сбалансированное использование ресурсов;
- сбалансированность времени ответа и коэффициента использования ресурсов;
- должна исключать бесконечное откладывание процессов;
- учитывать приоритеты;
- оказывать предпочтение тем процессам, которые занимают ключевые ресурсы;
- предусматривать улучшенное обслуживание для процессов, отличающихся «примерным поведением».
Заметим, что многие из этих целей противоречат друг другу, что делает планирование достаточно сложной проблемой.
Факторы, учитываемые при планировании
Для реализации перечисленных выше целей механизмы планирования должны учитывать следующие факторы:
- лимитируется ли процесс вводом-выводом или ЦП;
- является ли процесс пакетным или диалоговым;
- обязательно ли малое время ответа;
- приоритет каждого процесса;
- частоту переключений с низкоприоритетных процессов, ожидающих освобождения уже занятых ресурсов;
- длительность периода времени, в течение которого ожидает каждый процесс;
- суммарное время работы каждого процесса и оценочное время, необходимое каждому процессу для завершения.
Планирование с переключением и без переключения
Планирование без переключения предусматривает, что после предоставления ресурсов ЦП какому-либо процессу, отобрать ЦП у этого процесса нельзя. Если же ресурсы ЦП можно отобрать, то говорят о планировании с переключением.
При использовании планирования без переключения коротким заданиям приходится больше ждать из-за выполнения длительных заданий, с другой стороны, для всех процессов создаются как бы равные условия, а времена ответа здесь более предсказуемы.
Планирование с переключением необходимо в системах, где процессы высокого приоритета требуют немедленного внимания, например в интерактивных системах разделения времени этот способ планирования позволяет гарантировать приемлемые времена ответа.
Приоритеты
Система может присваивать процессам приоритеты автоматически или они могут назначаться извне. Приоритеты могут быть заслуженными или купленными. Они могут быть статическими или динамическими. Они могут назначаться по какому-то рациональному принципу или присваиваться в ситуациях, когда системе просто необходимо каким-либо образом различать процессы.
Статические приоритеты не изменяются, такой механизм установки приоритетов достаточно прост и не сопряжен с большими издержками. Однако следует учитывать, что такой механизм недостаточно гибок, т.к. не реагирует на изменение окружающей ситуации.
Динамические приоритеты позволяют повысить реактивность системы, т.к. реагируют на изменения ситуации, и начальное значение приоритета процесса может быть изменено на новое, более подходящее значение.
Покупаемые приоритеты дают возможность пользователю повысить приоритет задания и получить более высокий уровень обслуживания за "дополнительную плату" (например, уменьшение кванта времени).
Алгоритмы планирования
Планирование по принципу FIFO (first-in-first-out)
Принцип FIFO, «первый пришедший обслуживается первым», является наиболее простой дисциплиной планирования. ЦП предоставляется процессам в порядке их прихода в очередь готовности.
После того, как процесс получает ЦП в свое распоряжение, он выполняется до завершения, т.е. это дисциплина планирования без переключения, поэтому ее не рекомендуют использовать в системах с разделением времени.

Рис. 5. Планирование по принципу FIFO
Как правило, принцип FIFO редко используется самостоятельно в качестве основной дисциплины обслуживания, чаще он комбинируется с другими дисциплинами, например, диспетчирование процессов может выполняться согласно их приоритетам, однако процессы с одинаковыми приоритетами диспетчируются по принципу FIFO.
Циклическое планирование round robin (RR)
Планирование по принципу RR предполагает диспетчирование процессов по принципу FIFO, но каждый процесс получает временной квант, в течение которого он может использовать ресурсы ЦП. Если завершения процесса не происходит по истечении кванта времени, то этот процесс переводится в конец списка готовых к выполнению процессов, а ресурсы ЦП предоставляются следующему процессу из списка. Такой алгоритм планирования подходит, например, для работы с разделением времени, когда система должна гарантировать приемлемые времена ответа для всех интерактивных пользователей.
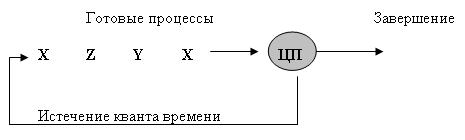
Рис. 6. Планирование по принципу RR
Очевидно, что для данного алгоритма планирования основной вопрос заключается в определении размера кванта времени, и следует ли делать его фиксированным или переменным. Очевидно, если квант времени выбирается слишком большим, то система RR фактически вырождается в FIFO, т.к. каждому процессу выделяется достаточно времени для завершения. Если же квант времени выбирается слишком малым, то контекстные переключения начинают играть доминирующую роль, что в итоге ухудшает характеристики системы.
Многоуровневые очереди с обратными связями
Механизм планирования должен оказывать предпочтение коротким заданиям с лимитируемым вводом-выводом, чтобы обеспечить хороший коэффициент использования устройств ввода-вывода; как можно быстрее определять характер задания, чтобы соответствующим образом ппланировать его выполнение. Многоуровневые очереди с обратными связями позволяют достичь этих целей.
При таком алгоритме планирования, новый процесс входит в сеть очередей с конца верхней очереди и перемещается по ней по принципу FIFO пока не получит в свое распоряжение ЦП. Если процесс не успевает завершиться по истечении отведенного ему кванта времени, он перемещается в конец очереди более низкого уровня и получит в свое распоряжение ЦП, когда достигнет начала этой очереди и не будет ожидающих процессов в верхней очереди. Обычно в такой многоуровневой системе предусматривается нижняя очередь, организованная по принципу RR, где процесс циркулирует до окончательного завершения. Как правило, в таких структурах квант времени при переходе в каждую очередь более низкого уровня увеличивается.
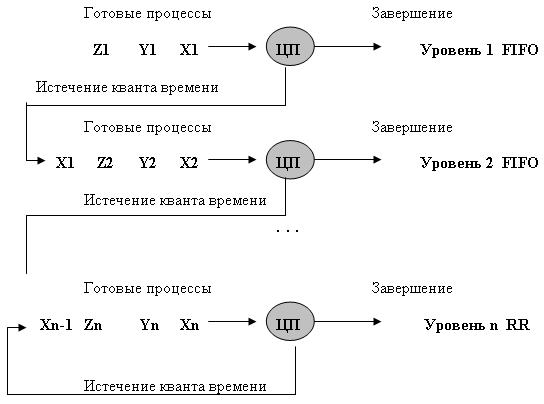
Рис. 7. Многоуровневые очереди с обратными связями
Многоуровневые очереди с обратными связями представляют собой идеальный механизм, позволяющийцессы на категории в соответствиии с их потребностями в ресурсах ЦП. В системе с разделением времени, каждый раз, когда процесс выходит из сети очередей, он может быть отмечен признаком очереди самого низкого уровня, где он побывал, что дает возможность впоследствии, когда он снова войдет в сеть очередей, направлять его прямо в ту очередь, в которой он в последний раз завершал свою работу. Заметим, что при таком алгоритме планирования, чем дольше процесс занимает ЦП, тем ниже становится его приоритет, пока процесс не опускается в очередь самогго приоритета. Размер же кванта времени, выделяемого процессу, как правило увеличивается по мере перехода процесса в каждую следующую очередь.
Сеть мноуровневых очередей с обратными связями — это пример адаптивного механизма планирования, который реагирует на изменение поведения контролируемой им системы.
Особенности управления процессами в ОС РВ
В связи с проблемой дедлайнов главной проблемой в ОСРВ становится планирование задач (scheduling), которое обеспечивало бы предсказуемое поведение системы при всех обстоятельствах. Процесс с дедлайнами должен стартовать и выполняться так, чтобы он не пропустил ни одного своего дедлайна. Если это невозможно, процесс должен быть отклонен.
В связи с проблемами планирования в ОСРВ используются статические алгоритмы планирования (RMS – Rate Monotonic Scheduling) [LL73] и динамические алгоритмы планирования (EDF – Earliest Deadline First).
Статические алгоритмы
Примером такого алгоритма является алгоритм планирования со статическим расписанием. Он подразумевают, что расписание запуска задач составляется заранее, до старта системы. Планировщик лишь просто следует этому расписанию и не составляет его в ходе работы. Строго это относится, разумеется, только к периодическим задачам. Если же имеются еще и спорадические задачи, то планировщик, естественно, должен выбрать моменты времени запуска таких задач по ходу работы.
К преимуществам данного класса алгоритмов относят следующие обстоятельства:
- Исключительная простота, обусловленная отсутствием понятия "процесс"/"поток". Передача управления задаче — вызов подпрограммы
- Как следствие, результаты тестирований и поверок весьма надежны.
Благодаря этим качествам, алгоритмы именно этого типа чаще всего применяются там, где требуется высокая надежность (автопилоты и т.п.)
К недостаткам — следующие:
- Негибкость. Любое изменение (числа задач, времен исполнения и т.д.) требует останова системы и пересчета расписания.
- Планировщик фактически "отвязан" от внешного мира, так как работает по прерываниям от таймера. Учет спорадических задач довольно сложен.
- Размер таблицы с расписанием может оказаться большим при соответствующих соотношениях между периодами задач.
Динамические алгоритмы
Принцип работы планировщиков на основе приоритета задач состоит в том, что в каждый момент момент времени исполняется та задача, которая имеет наивысший приоритет. Различные виды планировщиков различаются правилами, в соответствии с которыми назначается приоритет. У работ одной и той же задачи может быть разный приоритет. В этом случае планировщик (или алгоритм) называется динамическим алгоритмом с динамическими приоритетами.
Рассмотрим 2 алгоритма динамического планирования с динамическими приоритетами
- EDF (earliest deadline first) — приоритет задачам назначается по принципу "в каждый момент времени наивысший приоритет имеет та задача, у которой осталось меньше всего времени до крайнего срока".
- LLF (least laxity first) — приоритет задачам назначается по принципу
"в каждый момент времени наивысший приоритет имеет задача с наименьшим
резервом времени (laxity)".
Резервом (запасом) времени называется разность между временем, оставшимся до крайнего срока и временем, которое задаче еще нужно проработать
При этом имеются 2 модификации алгоритма EDF:
- с вытесненением задач
- без вытеснения задач
Под вытеснением имеется ввиду то, что если во время работы какой-то задачи возникает работа другой задачи с приоритетом выше, чем у работающей в данный момент, то управление передается вновь возникшей задаче.
При невытесняющем EDF задача всегда доделывает свою очередную работу до конца, независимо от того, появились ли во время работы этой задачи другие задачи с более высоким приоритетом или не появились.
Алгоритмы EDF и LLF считаются оптимальными для любого набора задач (периодические с любым соотношением между периодами и крайними сроками, спорадические) если:
- все задачи независимы
- возможно вытеснение
- вытеснение не требует временных затрат (что не соответствует реальному положению вещей)
Другим классом динамических алгоритмов являются динамические алгоритмы планирования со статическими приоритетами. Напомним, что принцип работы любого планировщика на основании приоритета состоит в том, что в каждый момент времени исполняется та задача, которая имеет наивысший приоритет. В случае динамических планировщиков со статическими приоритетами задач приоритет задачи, будучи однажды ей назначен, не изменяется с течением времени. Приводимые далее способы назначения приоритетов ориентированы на системы периодических задач.
Существует 2 распространенных способа назначения приоритетов:
- RMS (rate monotonic scheduling). Правило назначения приоритетов таково: чем меньше период задачи, тем выше у нее приоритет. Иными словами, чем чаще (отсюда rate) задача переходит в состояние готовности, тем ее приоритет выше.
- DMS (deadline monotonic scheduling). В этом алгоритме приоритеты назначаются по немного другому правилу: чем меньше относительный крайний срок задачи, тем выше ее приоритет.
Эти алгоритмы неоптимальны, так как при определенных условиях могут привести к превышению дедлайна, однако ввиду их относительной простоты именно они чаще используются в системах реального времени
Резюме
Обычно в ОСРВ используется планирование с приоритетами, прерывающими обслуживание, которое основано на RMS. Приоритетное прерывание обслуживания (preemption) является неотъемлемой составляющей ОСРВ, т.к. в системе реального времени должны существовать гарантии того, что событие с высоким приоритетом будет обработано перед событием более низкого приоритета. Все это ведет к тому, что ОСРВ нуждается не только в механизме планирования на основе приоритетов, прерывающих обслуживание, но также и в соответствующем механизме управления прерываниями. Более того, ОСРВ должна быть способна запрещать прерывания, когда необходимо выполнить критический код, который нельзя прерывать. Длительность обработки прерываний должна быть сведена к минимуму.
ОСРВ должна обладать развитой системой приоритетов. Во-первых, это требуется потому, что система сама может рассматриваться как набор серверных приложений, подразделяющихся на потоки, и несколько высоких уровней приоритетов должно быть выделено системным процессам и потокам. Во-вторых, в сложных приложениях необходимо все потоки реального времени помещать на разные приоритетные уровни, а потоки не реального времени помещать на один уровень (ниже, чем любые потоки реального времени). При этом потоки не реального времени можно обрабатывать в режиме циклического планирования (RRS – round-robin scheduling), при котором каждому процессу предоставляется квант времени процессора, а когда квант заканчивается, контекст процесса сохраняется, и он ставится в конец очереди. Во многих ОСРВ для планирования задач на одном уровне используется RRS. Приоритетный уровень 0 обычно используется для холостого режима.
При планировании на основе приоритетов необходимо решить две обязательные проблемы:
- обеспечить выполнение процесса с наивысшим приоритетом,
- не допустить инверсии приоритетов, когда задачи с высокими приоритетами ожидают ресурсы, захваченные задачами с более низкими приоритетами.
Для борьбы с инверсией приоритетов в ОСРВ часто используется механизм наследования приоритетов, однако при этом приходится отказываться от планирования на основе RMS, поскольку приоритеты становятся динамическими.
Контрольные вопросы
CC-BY-CA Анатольев А.Г., 31.01.2012